Задача 16. Движение по линии с предварительной калибровкой на поле (NXT-G)
Перед основной программой движения размещена подпрограмма, позволяющая откалибровать датчик освещенности. Датчик снимает с поля два показания: наименьшую освещенность (черный цвет) и наибольшую освещенность (белый цвет). Высчитывается среднее арифметическое этих значений, которое впоследствии принимается за пороговое значение при движении робота. Такая калибровка избавит оператора от изменения программы вручную в зависимости от освещенности поля.
Основная программа
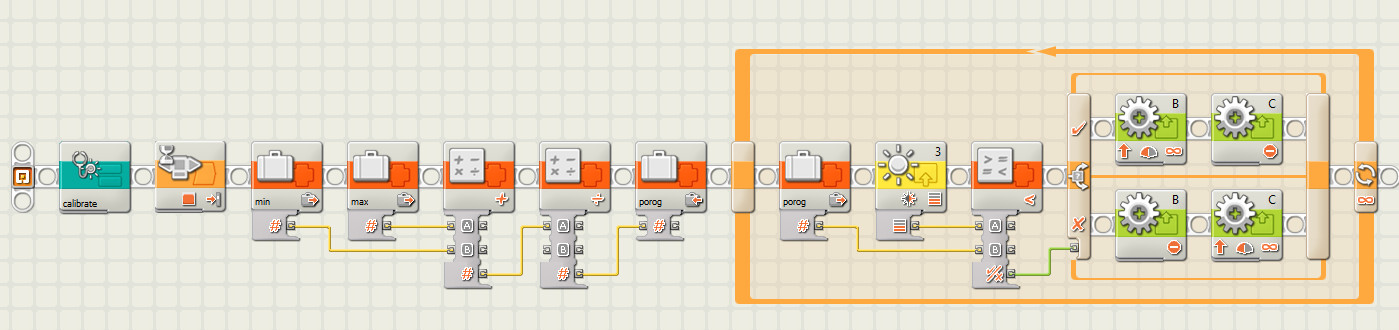
Подпрограмма


Поделиться с друзьями: