
|
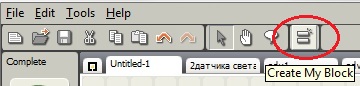
Подпрограмма – это самостоятельная часть программы, организованная в виде отдельного блока. Такие блоки создаются для удобства. Например, Вам приходится использовать в программе повторяющиеся фрагменты из нескольких команд. Этот фрагмент можно выделить и поместить в отдельный блок. Теперь он выглядит как одна команда и занимает меньше места. Вам не придется копировать каждый раз последовательность из нескольких команд, достаточно будет поместить в программу созданный Вами блок. Для создания подпрограммы выделите мышью команды, которые нужно в нее поместить и нажмите на кнопку CreateMyBlock (Создать Мой Блок) в верхнем меню программного обеспечения (рис. 201).
Рис. 202 Расположение кнопки CreateMyBlock (Создать Мой Блок) После нажатия на кнопку откроется окно создания блока. Здесь Вам необходимо указать имя блока и краткое описание его предназначения (необязательно, но поможет Вам запомнить, для каких целей создан блок). После нажатия на кнопку Next (Далее) Вам предоставляется возможность изменить внешний вид пиктограммы Вашего блока. Как только результат Вас устроит, нажмите на кнопку Готово. На рабочем поле появится команда с пиктограммой, которую Вы только что составили. Если дважды щелкнуть по ней мышью, откроется внутреннее содержание подпрограммы. Рассмотрим пример использования подпрограмм (рис. 203).
Рис. 203 Использование подпрограммы MyBlock (Мой блок) В приведенном примере подпрограмма названа MoveDisp, ее внутреннее содержание показано на рисунке 204.
Рис. 204 Блок MoveDisp Итак, вся программа целиком выполняет следующие действия: моторы В и С запускаются вперед, на дисплей выводится изображение улыбающегося лица; после нажатия кнопки на датчике касания, моторы останавливаются, изображение на дисплее меняется; запускается мотор В, разворачивая робота на 90 градусов; оба мотора снова запускаются вперед, первоначальное изображение на экране дисплея восстанавливается; робот движется до нажатия кнопки на датчике касания, после чего программа завершает работу. Таким образом, робот проехал поворот вдоль стены лабиринта. Созданный однажды блок можно использовать в любой момент. Он находится на палитре команд, на вкладке Моя палитра (рис. 205).
Рис. 205 Расположение подпрограммы на палитре команд
Практическая работа №47 – «Матрешка»: Составьте программу движения робота по квадрату. Перед каждым поворотом робот должен остановиться, издать звуковой сигнал из пяти нот и вывести на экран дисплея изображение стрелки, указывающей направление поворота. Когда поворот совершен, дисплей должен быть очищен. Комментарии к заданию Используйте механизм подпрограмм для решения задачи. |




Поделиться с друзьями: