
|
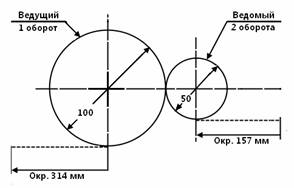
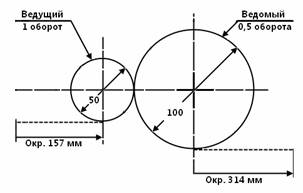
Устройства, предназначенные для передачи мощности двигателя исполнительными органами машин, называются передаточными механизмами или механическими передачами. Механические передачи позволяют понижать (повышать) скорость, осуществлять ступенчатое или бесступенчатое регулирование ее в широком диапазоне, изменять направление движения, преобразовывать один вид движения в другой, приводить в движение несколько механизмов от одного двигателя. Типы механических передач LEGO «Technic»: v зубчатые (цилиндрические, конические, червячная, реечная, планетарная); v с гибкими элементами (цепные, ременные); v фрикционные. По способу передачи движения: v движение с вала на вал передается за счет сил трения (ременные, червячные, фрикционные); v движение передается зацеплением (зубчатые, цепные, с зубчатыми ремнями, червячные). Рассмотрим принцип работы механической передачи. Будем условно называть пару, осуществляющую вращательное движение, колесами. Колесо, от которого передается вращение, принято называть ведущим, а колесо, получающее движение — ведомым. Зная число оборотов в минуту ведущего колеса, мы можем определить число оборотов ведомого колеса. Число оборотов ведомого колеса зависит от соотношения диаметров соединенных колес. Если диаметры обоих колес будут одинаковы, то и колеса будут крутиться с одинаковой скоростью. Если диаметр ведомого колеса будет больше ведущего, то ведомое колесо станет крутиться медленнее, и наоборот, если его диаметр будет меньше, оно будет делать больше оборотов (рис 211).
Рис. 211 Зависимость числа оборотов от диаметров колес В LEGO «Technic» для моделей используются электродвигатели. Главная причина этого заключается в том, что электрический двигатель компактен, постоянно готов к работе и преобразовывать электрическую энергию в механическую может до тех пор, пока к нему подводится напряжение (подробнее о различных электродвигателях LEGO «Technic» будет рассмотрено в § 26). Каждый двигатель имеет свою механическую мощность (N), специфичную для конкретного типа двигателя. Важно то, что механическая мощность двигателя зависит от двух величин: угловой скорости и крутящего момента. Угловая скорость (ω) – это число оборотов вала двигателя, производимое в течение заданного интервала времени. В LEGO механизмах угловая скорость вращающихся осей двигателя преобразуется в линейную скорость транспортного средства. Единицы измерения угловой скорости - обороты в минуту (обороты в секунду). Различные типы двигателей LEGO имеют различные значения угловых скоростей, с менее чем 20 оборотами в минуту до более 1000 оборотов в минуту. Крутящий момент(M) – это сила, с которой приводной вал вращается. Чем выше крутящий момент, тем труднее остановить приводной вал. Поэтому двигатели, которые предлагают высокий крутящий момент, как правило, предпочтительнее, поскольку они могут приводить в движение тяжелые транспортные средства или более сложные механизмы, чем двигатели с низким крутящим моментом (чем больше вращающий момент, тем мощнее двигатель). Единица измерения вращательного момента в LEGO моторах – Н·см (произведение Ньютон на сантиметр). Значение вращающего момента у моторов LEGO «Technic» колеблется от 0,5 до 16,7 Н·см. Механическая мощность в некотором упрощении - это произведение крутящего момента и угловой скорости. механическая мощность = крутящий момент × угловая скорость N=Mω Мощность двигателя при нормальной скорости вращения есть величина постоянная, поэтому M=N/ω, т.е. крутящий момент двигателя обратно пропорционален угловой скорости вала двигателя. В практических расчетах зависимость между мощностью, скоростью вращения вала и крутящим моментом на валу определяется для электродвигателей формулой: М=5,8N/n, М – крутящий момент на валу, N - мощность, n- скорость вращения вала. Таким образом, для того чтобы при той же мощности двигателя, которой мы располагаем, увеличить крутящий момент, надо снизить скорость вращения вала. Сделать это можно с помощью специальных механизмов, называемых редукторами (от английского слова reduce – уменьшать, понижать). Механизмы, предназначенные для увеличения скорости, а, следовательно, и для уменьшения крутящего момента на валу, называются мультипликаторами (multiplication – умножение, увеличение). Рассмотрим модель колесного робота – мы хотим, чтобы он был легким и быстрым. Так как легкому роботу не требуется большого крутящего момента для перемещения, то мы можем преобразовать скорость вращения вала двигателя за счет использования пары зубчатых колес. Используя выше приведенное правило, нам необходимо на вал двигателя поставить шестерню большего диаметра (ведущая шестерня), а в качестве ведомой использовать шестерню меньшего диаметра, при этом мы уменьшим крутящий момент и увеличим скорость. Вопрос: как измениться крутящий момент и скорость, если в качестве ведущего колеса использовать шестерню меньшего диаметра, чем у ведомой шестерни? Зубчатые передачи Зубчатой передачей называется механизм, служащий для передачи вращательного движения с одного вала на другой и изменения частоты вращения посредством зубчатых колес и реек. Рис. 212 Зубчатые передачи Количество зубьев на зубчатых колесах может быть разным. Самое малое число зубьев – шесть. Зубчатые колеса с таким числом зубьев назывались шестеренками. Позже это название стало применяться ко всем зубчатым колесам с любым количеством зубьев.
Рис. 213 Примеры крепления зубчатых колес с балками Если при непосредственном соединении двух зубчатых колес ведомое колесо вращается не в том направлении, которое нужно конструктору, достаточно разделить два колеса третьим с любым числом зубьев, и ведомое колесо изменит направление вращения. При этом передаточное отношение (и передаточное число) не изменятся. Это промежуточное зубчатое колесо называют «паразитным». «Паразитные» колеса устанавливают в том случае, когда необходимо увеличить расстояние между центрами ведущего и ведомого валов.
Рис. 214 Примеры использования «паразитных» колес Итак, зубчатая передача может: v передавать вращательное движение; v изменять число об/мин; v увеличивать или уменьшать силу вращения; v менять направление вращения. В зависимости от формы колес и их взаимного расположения различают следующие виды зубчатых передач: цилиндрическая, коническая, червячная, реечная, планетарная. Цилиндрическая передача состоит из двух или нескольких цилиндрических колес установленных на параллельных валах. Рис. 215 Цилиндрическая передача Коническая передачасостоит из двух конических колес, находящихся на двух валах, оси которых пересекаются. Угол пересечения может быть любой, но обычно он равен 90º. Рис. 216 Коническая передача Червячная передача (зубчато-винтовая передача) - механическая передача, осуществляющаяся зацеплением червяка и сопряжённого с ним червячного колеса. Червячная передача применяется для перекрещивающихся, но не пересекающихся валов. Червячная передача состоит из винта (червяка) и зубчатого колеса. Рис. 217 Червячная передача Червячная передача обладает рядом уникальных свойств. Во-первых, она может быть использована только в качестве ведущего зубчатого колеса, и никак не может быть ведомой шестерней. Это очень удобно для механизмов, которые нужны для поднятия и удержания груза без нагрузки на двигатель. Существует много возможных применений этого свойства червячной передачи, например, во многих видах подъемных кранов и погрузчиков, железнодорожных барьеров, разводных мостах, лебедках. Очень широко червячная передача LEGO используется в конструкции захвата для робота-манипулятора. Во-вторых, характерной особенностью червячной передачи является то, что она имеет большое передаточное отношение. Поэтому червячные передачи используются как понижающее всякий раз, когда есть очень высокий крутящий момент. Вывод: червячная передача имеет ряд преимуществ: v Занимает мало места. v Имеет свойство самоторможения. v Во много раз снижает число об/мин. v Увеличивает силу привода. v Изменяет направление вращательного движения на 90°. Реечная передача – механическая передача, преобразующая вращательное движение зубчатого колеса в поступательное движение рейки и наоборот. Рейку можно рассматривать как вытянутую в прямую линию окружность большого зубчатого колеса.
Следует отметить, что существует в наборах LEGO коронная шестерня и шестерни с внутренним зацеплением. Коронная шестерня - это особый тип шестерен, их зубья находятся на боковой поверхности. Такая шестерня работает, как правило, в паре с прямозубой шестерней.
Рис. 220 Соединения короной шестерни и цилиндрических колес с 8 и 24 зубьями Шестерни с внутренним зацеплением имеют зубья, нарезанные с внутренней стороны. При их использовании происходит одностороннее вращение ведущей и ведомой шестерен. В данной зубчатой передаче меньше затрат на трение, а значит выше коэффициент полезного действия*. Применяются зубчатые колеса с внутренним зацеплением в ограниченных по габаритам механизмах, в планетарных передачах, в приводе робота манипулятора. Рис. 221 Шестерня с внутренним зацеплением Особенность шестерни с внутренним зацеплением LEGO - наличие зубьев на внешней стороне, поэтому ее можно использовать в передачах как цилиндрическое колесо с 56 зубьями.
Рис. 222 Способы соединения колеса с внутренним зацеплением с цилиндрической шестерней, колесом с короной и «червяком»
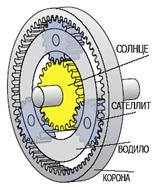
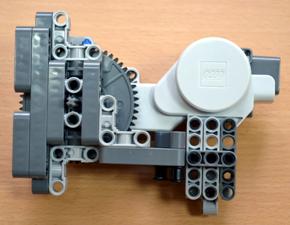
Рис. 223 Способ соединения колеса с внутренним зацеплением с мотором Планетарная передача Планетарная передача (дифференциальная передача) — механическая система, состоящая из нескольких планетарных зубчатых колёс (шестерён), вращающихся вокруг центральной, солнечной, шестерни. Обычно планетарные шестерни фиксируются вместе с помощью водила. Планетарная передача может также включать дополнительную внешнюю кольцевую (коронную) шестерню, имеющую внутреннее зацепление с планетарными шестернями. Такая передача нашла широкое применение, например, она используется в кухонной технике или автоматической коробке передач автомобиля. Основными элементами планетарной передачи можно считать следующие: v Солнечная шестерня: находится в центре; v Водило: жёстко фиксирует друг относительно друга оси нескольких планетарных шестерён (сателлитов) одинакового размера, находящихся в зацеплении с солнечной шестерней; v Кольцевая шестерня: внешнее зубчатое колесо, имеющее внутреннее зацепление с планетарными шестернями. Рис. 224 Пример планетарной передачи: водило неподвижно, солнце ведущее, корона ведомая В планетарной передаче крутящий момент передается с помощью каких-либо (в зависимости от выбранной передачи) двух ее элементов, из которых один является ведущим, второй — ведомым. Третий элемент при этом неподвижен (таблица 8). Таблица 8. Элементы планетарной передачи
Реверс — изменение хода механизма на обратный, противоположный.
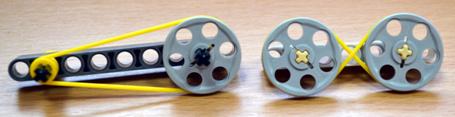
Рис. 225 Пример конструкции планетарной передачи: корона неподвижна, водило ведущее, солнце ведомое Механические передачи с гибкими элементами Для передачи движения между сравнительно далеко расположенными друг от друга валами применяют механизмы, в которых усилие от ведущего звена к ведомому передается с помощью гибких звеньев. В качестве гибких звеньев применяются ремни, шнуры, цепи различных конструкций. Передачи с гибкими звеньями могут обеспечивать постоянное и переменное передаточное отношение со ступенчатым или плавным изменением его величины. Ременная передача Ременная передача состоит из двух шкивов, закрепленных на валах, и ремня, охватывающего эти шкивы. Нагрузки передается за счет сил трения, возникающих между шкивами и ремнем вследствие натяжения последнего. Ременная передача мало чувствительна к взаимному положению ведущего и ведомого валов. Их можно даже повернуть под прямым углом друг к другу или ремень надеть в виде перекрещенной петли, и тогда направление вращения ведомого вала измениться.
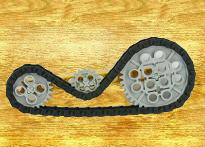
Рис. 226 Ременная передача Цепная передача Если два зубчатых колеса находятся на значительном удалении друг от друга, то вместо большого числа паразитных шестерен, которые неизбежно усложнят конструкцию и сделают ее более тяжелой, зубчатые колеса соединяют цепью, как ремнем в ременной передаче. При цепной передаче зубчатые колеса называются звездочками. Цепная передача, в отличие от ременной, позволяет сохранять постоянным передаточное отношение. Рис. 227 Цепная передача Фрикционная передача
Рис. 228 Фрикционная передача При фрикционной передаче вращение от одного колеса к другому передается при помощи силы трения. Оба колеса прижимаются друг к другу с некоторой силой и вследствие возникающего между ними трения одно вращает другое. Фрикционные передачи широко применяются в машинах. Недостаток фрикционной передачи: большая сила, давящая на колеса, вызывающая дополнительное трение в машине, а, следовательно, требующая и дополнительную силу для вращения. Кроме того, колеса при вращении, как бы они ни были прижаты друг к другу, дают проскальзывание. Поэтому там, где требуется точное соотношение чисел оборотов колес, фрикционная передача себя не оправдывает.
Проект «Автоматический шлагбаум»: 1. Сконструируйте модель автоматического шлагбаума. Технические условия: а) в модель входит один сервомотор, микроконтроллер NXT; б) в конструкции используется червячная передача; в) автоматическое поднимание и опускание стрелы шлагбаума должно происходить при помощи ультразвукового датчика. 2. В рабочей тетради выполните эскиз модели. 3. Обсудите проект с учителем. 4. В рамках робототехнического кружка изготовьте автоматический шлагбаум. 5. С помощью языка программирования NXT-G напишите программу для управления моделью. 6. В рабочей тетради составьте описание автоматического шлагбаума.
Проект «Поворотная платформа»: 1. Сконструируйте модель поворотной платформы. Технические условия: а) в модель входит один сервомотор, микроконтроллер NXT; б) в конструкции используется шестерня с внутренним зацеплением; в) автоматический поворот платформы происходит с помощью датчика касания (датчика освещенности). 2. В рабочей тетради выполните эскиз модели. 3. Обсудите проект с учителем. 4. В рамках робототехнического кружка изготовьте поворотную платформу. 5. С помощью языка программирования NXT-G напишите программу для управления моделью. 6. В рабочей тетради составьте описание поворотной платформы.
Проект «Раздвижные автоматические двери»: 1. Сконструируйте модель раздвижных автоматических дверей. Технические условия: а) в модель входит один сервомотор, микроконтроллер NXT; б) в конструкции используется реечная передача; в) автоматическое открывание дверей происходит при помощи ультразвукового датчика (датчика освещенности). 2. В рабочей тетради выполните эскиз модели. 3. Обсудите проект с учителем. 4. В рамках робототехнического кружка изготовьте модель раздвижных автоматических дверей. 5. С помощью языка программирования NXT-G напишите программу для управления моделью. 6. В рабочей тетради составьте описание модели раздвижных автоматических дверей. |






























Поделиться с друзьями: