
В истории развития робототехники выделяют четыре основных этапа:
- Глубокая древность.
- Средние века.
- Конец XIX – начало XX в.
- XX в. – начало XXI в.
Глубокая древность
|
|
Уже в те времена появились идеи создания технических средств, похожих на человека, и были предприняты первые попытки по их созданию. Статуи богов с подвижными частями тела (руки, голова) появились еще в Древнем Египте, Вавилоне, Китае. Одним из ранних упоминаний об искусственном человеке (3 век до н. э.) является бронзовый великан Талос, построенный Гефестом для охраны острова Крит от врагов. В «Илиаде» Гомера (9 век до н. э.) божественный кузнец Гефест выковывал механических служанок. В работах Платона (5 век до н. э.) выражались идеи, имеющие отношение к человеческому мышлению и механике машин. Блестящий философ и математик Архит из Тарентума, друг Платона, сконструировал деревянного голубя, который мог летать и управлялся струей пара. |
 |
 |
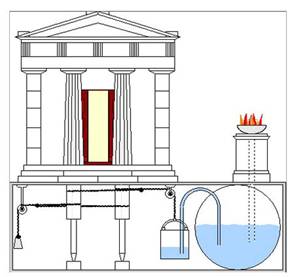
| Рис.1 Автоматические двери древнегреческого храма | Рис.2 Автомат Герона |
|
|
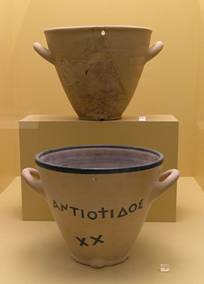
Рис. 3 Водяные часы – клепсидры |
В 3 веке до н.э. римский поэт Клавдий упоминал об автомате, изготовленном Архимедом. Он имел форму стеклянного шара с изображением небесного свода, на котором воспроизводилось движение всех известных в то время небесных светил. Шар приводился в движение водой. А греческий изобретатель и физик Ктесибий из Александрии сконструировал водяные часы. Это был первый автомат для точного измерения времени. До нас дошли книги Герона Александрийского (I век н.э.), где описаны подобные и многие другие автоматы древности. В качестве источника энергии в них использовались вода, пар, гири (рис. 1-3). В «Театре автоматов» описано даже устройство целого театра, представление в котором разыгрывали фигурки-куклы, приводимые в движение с помощью системы зубчатых колес, блоков и рычагов. |
Средние века
| В средние века большой популярностью пользовались различного рода автоматы, основанные на использовании часовых механизмов. Были созданы всевозможные часы с движущимися фигурами людей, ангелов и т. п. К этому периоду относятся сведения о создании первых подвижных человекоподобных механических фигур – андроидов. Так, андроид алхимика Альберта Великого (1193 – 1280) представлял собой куклу в рост человека, которая, когда стучали в дверь, открывала и закрывала ее, кланяясь при этом входящему. |

Рис. 4 Механический человек Леонардо да Винчи
|
В 13 веке Альберт Великий создал автомат, ставший впоследствии известным как «говорящая голова», способный воспроизводить человеческий голос. В 1495 году Леонардо да Винчи разработал детальный проект механического человека, способного двигать руками и поворачивать голову (рис. 4). А в 1500 году он построил механического льва, который при въезде короля Франции в Милан выдвигался, раздирал когтями грудь и показывал герб Франции. Работы по созданию андроидов достигли наибольшего развития в XVIII в. одновременно с расцветом часового мастерства. Французский механик и изобретатель Жак де Вокансон (1709-1789) создал в 1738 году первое работающее человекоподобное устройство (андроид), которое играло на флейте. «Флейтист» был ростом с человека. Подвижными пальцами он мог исполнять 11 мелодий с помощью заложенной в него программы. Вокансон также создал механическую утку, покрытую настоящими перьями, которая могла ходить, двигать крыльями, крякать, пить воду, клевать зерно и, перемалывая его маленькой внутренней мельницей, отправлять нужду на пол. Утка состояла из более чем 400 движущихся деталей и была однозначно признана венцом творения мастера (рис. 6). |
|
Рис. 5 Жак де Вокансон |
Рис. 6 Механическая утка Жака де Вокансона |
||
|
|
Рис. 7 Пьер Жаке Дро |
Созданием автоматов также занимались швейцарские часовщики Пьер Жаке Дро (1721-1790) и его сын Анри Дро (1752-1791). От имени последнего позднее было образовано и понятие «андроид». Пьер Жаке Дро создал несколько автоматов, из которых наибольшую известность получили писец и художник (рис. 8). Писец представлял собой сидящую за столом девочку, которая выписывала аккуратным почерком буквы, слова и даже могла нарисовать собаку. При этом она плавно покачивала головой и опускала веки в такт движения руки. Вместе с сыном они создали девушку, играющую на клавесине. |
|



| Сохранилось восторженное описание этой фигуры современником: «Девушка играет, шевелит губами, грудь ее поднимается и опускается при «дыхании», она смотрит на клавиши, в ноты, а иногда бросает взгляд на публику, по окончании «номера» встает и кланяется». |

Рис. 8 Автоматы Пьера и Анри-Луи Жак Дро
|
Рис. 9 Часы И.П. Кулибина |
Эти человекоподобные игрушки представляли собой многопрограммные автоматы с оперативно сменяемыми программами. Не остались в стороне и русские механики. Однако их творения отличались простотой конструкции. Так, механик И.П. Кулибин (1735-1818) построил в течении трех лет яичную фигуру – универсальные часы (рис. 9). Часы давали театрализованное представление и играли музыку. В этих часах было три самостоятельных механизма и три завода: часовой, боевой и курантовый, а также автоматические приборы для приведения в действие механизмов, воспроизводящих сцены,музыку и бой. Как свидетельствует сохранившаяся опись частей, составленная Кулибиным, часы яичной фигуры состояли из 427 деталей. Все они были изготовлены исключительно точно и тонко. |

| Вместе с непосредственным созданием различных автоматических устройств, выполнявших функции живых существ, в средние века были заложены основы различных научных направлений. Еще у Леонардо да Винчи (1452-1519) делались попытки установить соответствие между механизмами и отдельными органами человека. А знаменитый французский философ и математик Рене Декарт говорил, что тела животных есть не что иное, как сложные машины. |
|
Рис. 10 Джованни Альфонсо Борелли |
В XVI-XVII вв. возникает новое научное направление на стыке физиологии и механики – ятромеханика (от греч. iatros – врач). Его выдающимся представителем был Джованни Альфонсо Борелли (1608-1679), врач и механик, профессор Мессинского университета. В его работе «О движении животных» рассматривается работа мускулов сердца, кровообращение других органов животных и человека на основе механических аналогий. На рубеже XVIII и XIX вв. в трудахЛазара Карно,Гаспара Монжа, Xосе Мария Ланца и Августина Бетанкура возникает наука о машинах. В 1841 г. Р. Виллис определил понятие механизма. |

 |
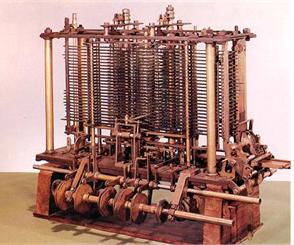 |
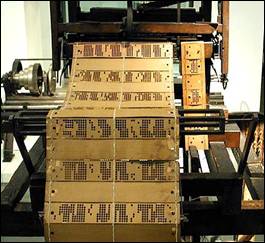
| Рис. 11 Ткацкий станок Жаккарда с перфокартами | Рис. 12 Модель арифметико-логического устройства аналитической машины Бэббиджа |
|
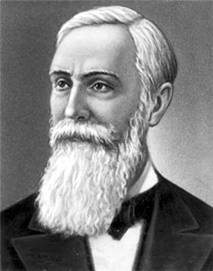
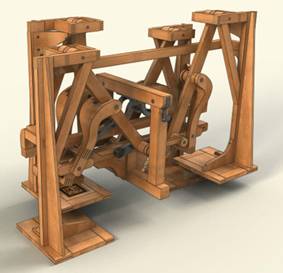
Промышленная революция второй половины XVIII века, связанная с переходом от ручного производства к машинному, заставляет изобретателей создавать новые машины и устройства. Именно в это время начали закладываться основы промышленной автоматики, особенно втекстильной промышленности. Еще в 1725 годуБэзил Бушонпридумываетперфорированную бумажную лентудля записи программы, которую в дальнейшем использует для программирования ткацких станков для производства шелковой ткани с рисунком. А в 1728Жан-Баптист Фалькон совершенствует это изобретение Бушона. Он заменяет перфорированную бумажную ленту карточками, соединенными в цепочку, что позволяет легко заменять отдельные фрагменты программы. В дальнейшем эти станки были усовершенствованы Вокансоном иЖозефом Мари Жаккардом, в 1805 году Жаккард создает автоматический станок, на котором можно производить ткани с заранее запрограммированным рисунком с помощьюперфокарт (рис. 11). Это изобретение явилось одним из важнейших событий, которые определи дальнейший технический прогресс промышленности и послужили толчком к развитию робототехники. Еще одним важным событием в области робототехники стало созданиепервой вычислительной машины. На основе способа программирования Жаккарда английский механикЧарльз Бэббидж(1792-1871) разработал счетную«Аналитическую машину», структурные особенности которой на целое столетие предопределили направление развития вычислительной техники (рис 12). Конец XIX – начало XX вв. В конце XIX века русский изобретатель Пафнутий Львович Чебышев (1821-1894) представил проект «стопохода» – человекоподобной машины повышенной проходимости. Примерно тогда же великий ученый Никола Тесла испытал радиоуправляемое судно (1898). |
|
Рис. 13 Пафнутий Львович Чебышев |
Рис. 14 «Стопоходящая машина» П.Л.Чебышева |
|
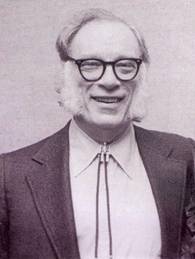
Благодаря развитию электротехники и электроники реализуются потребности общества и производства в различных автоматических устройствах. Литература и искусство в это время играют роль катализатора процесса развития робототехники. Именно в этот период появляется много научно-фантастических произведений литературы, в которых роботы-андроиды играют главные роли. Одним из главных произведений является пьеса «R. U. R.» (Rosse’s Universal Robots – «Россумские универсальные роботы») знаменитого чешского писателя Карла Чапека (1890-1938). В этой пьесе, поставленной 21 января 1921 года на сцене Пражского национального театра, рассказывается о Россуме, который основал фабрику, на которой биологическим путем выращивались роботы, отличавшиеся очень высокой работоспособностью. Несмотря на то, что эти создания сегодня получили бы скорее название «андроиды», чем «роботы», употребление слова «робот» стало повсеместным. Наверно более значительное место тема робототехники занимает в творчестве другого писателя-фантаста, американского ученого и популяризатора науки Айзека Азимова (1920-1992). В одном из своих рассказов, объединенных общим циклом «Я, робот», А. Азимов в 1942 г. попытался впервые сформулировать основные принципы поведения роботов и взаимодействия их с человеком, исходя из категорий добра и гуманности. |
|
|
Рис. 15 Айзек Азимов |
Эти принципы, названные тремя законами робототехники, гласят:
|
|
Благодаря всеобщему интересу к роботам изобретателям удается разрабатывать оригинальные конструкции роботов-андроидов: v «Мистер Телевокс» (1928, американский инженер Дж. Уэнсли) - робот, имевший внешнее сходство с человеком, способный выполнять элементарные движения по команде, подаваемой голосом, и ставший экспонатом Всемирной выставки в Нью-Йорке. v «Эрик»(1928) – робот, который на Выставке Британской ассоциации инженеров по моделированию «выступил» с небольшой речью. v «Естествоиспытатель»(1928, под руководством доктора Нисимура Макота) - японский робот, способный с помощью электропривода манипулировать руками и головой. Впоследствии этот андроид стал считаться родоначальником роботостроения в Японии. v «Альфа» (1932, английский изобретатель Гарри Мей) - человекоподобный автомат, который по голосовым командам садился и вставал, двигал руками и говорил. v «Сабор» (австрийский изобретатель Август Губер) – автоматы, которые управлялись по радио и могли говорить, ходить, выполнять разные манипуляции. v В2М(1936, московский школьник Вадим Мацкевич) - первый робот-андроид в России. В 1937 году был удостоен диплома Всемирной выставки в Париже. Несмотря на такой прорыв в сфере новой техники и демонстрацию творческих возможностей человека, все эти роботы имели крайне узкое практическое применение. Проблемы внедрения роботов в промышленность как таковые не решались. Если обратиться к роботам как к программно-управляемым многоцелевым автоматам манипуляционного типа, предназначенным для использования в промышленности или научных исследованиях, то одним из самых первых промышленных манипуляторов был поворотный механизм с захватным устройством для удаления заготовок из печи, разработанный в США Бэббитом в 1892 году. Особую известность получили копирующие манипуляторы, разработанныеГосударственным научно-исследовательским институтом штата Орегон (США) ANL. Предложенные им инструкции и принципы управления до сих пор находят применение во многих моделях промышленных роботов. Один из первых в ANL манипуляторов для обслуживания атомных станций был разработан в 1948 году под руководствомР. Герца. Это был двунаправленный копирующий манипулятор. Благодаря силовому очувствлению оператор, который находился за толстой перегородкой в специальном помещении, имел возможность не только наблюдать на экране перемещение управляемого им копирующего манипулятора, но и ощущать руками величину усилий, которые развивает захват манипулятора. Использование такой силовой обратной связи позволило упростить процесс управления на расстоянии и расширить функциональные возможности дистанционных управляемых манипуляторов. Более прямыми предшественниками современных манипуляционных роботов можно считать программируемыекраскораспылительные машины, разработанные в 1930-1940 гг. в США, например, машины Уилларда Л.В., ПоллардаиГарольда Роузландо, которые программировались путем записи сигнала от рычажного механизма, перемещаемого по заданной траектории. Возросший экономический потенциал и потребности в современных видах вооружения ведущих промышленных стран в первой половине XX века дают мощный импульс развитию науки и научно-технических направлений, без которых возникновение и прогресс современной робототехники стали бы невозможными. Речь идет, прежде всего, о вычислительной технике и кибернетике. В 1936-1937 годах английский математик Алан Мотисон Тьюринг (1912-1954) ввел концепцию «абстрактной вычислительной машины», способной с помощью простейших операций считывания и сдвига выполнять вычисления произвольной сложности. Эта машина в дальнейшем стала называться машиной Тьюринга и стала прообразом появившихся в конце 1940-х годов универсальных вычислительных машин. |
 |
 |
| Рис. 16 Алан Мотисон Тьюринг | Рис. 17 Джон фон Неймон |
|
На основе синтеза теории информационных процессов, вычислительной техники и функционально вычислительного подхода создается кибернетика, определяемая как наука об управлении сложными динамическими системами (акад. А. И. Берг). Ее «отцами» называют выдающихся американских ученых – математика Норберта Винера(1894-1964) и нейрофизиологаУоррена Мак Каллока(1898-1969), а датой официального рождения считается 1948 г., когда вышла в свет книга Н. Винера«Кибернетика, или управление и связь в животном и машине». Книга содержит описание общих концепций управления в любых системах, в особенности живых, машинных и социальных. Одной из самых важных идей книги является обоснование того, что процессы управления, такие как процессы передачи, хранения, переработки информации и связи в машинах, живых организмах и обществах подобны. Логическим завершением периода формирования теоретических основ вычислительной техники можно считать работы американского математика, одного из основоположников кибернетики Джона фон Неймана(1903-1957). Именно ему принадлежит идея записи программы решения какой-либо задачи в памятьЭВМ. Благодаря принципу хранимых программ вычислительные машины стали универсальными. Первыми компьютерами, в которых фоннеймановский принцип получил практическое воплощение, были вычислительная машина на электромагнитных релейных схемах Говарда Эйкена Mark I(1944 год) и электронная вычислительная машина ENIAC, разработанная в 1947 году под руководством Дж. Проспера Эккерта и Дж. Мокли, которые в последствии стали основателями знаменитой фирмы IBM. Вторая половина XX века Возникновение современных роботов следует отнести к 1959 г. В этом году в США были созданы первые промышленные манипуляторы с программным управлением, которые получили общепринятое название промышленных роботов (ПР) и положили начало коммерческому производству. В 50-х гг. XX века группа американских инженеров начала работу над проблемой применения теории управления в решении общих задач оптимального перемещения оборудования. Первопроходцами здесь стали два талантливых американских инженера – Джордж К. Девол (1912-2011) и Джозеф Ф. Энгельбергер (род. в 1925) . В 1954 г. Девол запатентовал в США способ перемещения предметов между различными участками предприятия на основе программы на перфокартах, сходных с предложенными когда-то Бэббиджем. Изобретение было призвано решить проблему универсального транспортировочного устройства, легко перестраиваемого для выполнения других операций. В 1956 г. Девол вместе с Энгельбергером, работавшим в одной из аэрокосмических компаний, организовали первую в мире робототехническую компанию «Unimation» («Юнимейшн»), что означает «универсальная автоматизация». В лаборатории этой компании и был создан первый в мире промышленный робот, носивший название «программируемое устройство для передачи предметов» и ставший прототипом последующих разработок. В начале 1960-х гг. первые американские промышленные роботы с торговыми марками «Unimate» и «Versatran» поступили на промышленный рынок. Они представляли собой уже достаточно совершенные системы с обратной связью и контролируемой траекторией движения, имели числовое программное управление и память, как у ЭВМ. Уже в первых роботах «Unimate» и «Versatran» был реализован принцип программирования обучением. Первые коммерческие успехи применения промышленных роботов явились мощным импульсом для их дальнейшего совершенствования. В начале 1970-х гг появляются роботы, управляемые компьютерами. Первый мини-компьютер, управляющий роботом, был выпущен в 1974 г. фирмой «Cincinnati Milacron», одной из ведущих фирм – изготовителей роботов в США. В конце 1971 г. американской фирмой «INTEL» был создан первый микропроцессор, а несколькими годами позже появляются роботы с микропроцессорным управлением, что обусловило существенное повышение их качества при одновременном снижении стоимости. |
|
Рис. 18 МРК-01 МГТУ им. Баумана |
1960 г – создание многофункциональных самоходных платформ для сбора радиоактивных материалов, а к 1970-м, после окончания Лунных программ США и СССР, появились аппараты для обезвреживания взрывоопасных предметов, например — сверхлёгкий мобильный робот МРК-01 МГТУ им. Баумана.
|

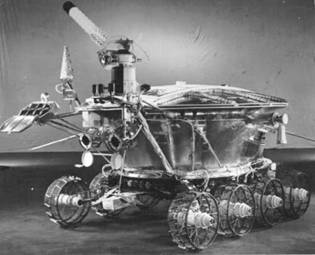
После создания и выхода на промышленный рынок первых роботов в мире началось стремительное развитие робототехники. Изменяется и сам принцип использования промышленных роботов – от единичного к комплексному. В ведущих робототехнических странах (Япония, США, ФРГ, СССР и др.) в конце 1960-х – начале 1970-х гг. разрабатываются и создаются гибкие производственные системы (ГПС), так называемые «безлюдные» производства. Научно-технические достижения робототехники позволили в 1960-1980-х гг. создать ряд сложных научных и специальных робототехнических комплексов для исследования космического пространства (станции типа «Луна», аппараты «Луноход» – СССР; станции типа «Маринер», «Сервейер», «Викинг» - США и др.), а также освоения подводных глубин (аппараты «TV», «Москито», «Долфин» – Япония; аппараты «KURV», «RCV» – США; «Манта», «ОСА» – СССР; «ROV», «RM» – Франция; «ARCS» – Канада).
 |
 |
| Рис. 19 Луноход-1 (СССР) | Рис. 20 Станция «Маринер-2» |
|
Технический прогресс в развитии роботов был направлен, прежде всего, на совершенствование систем управления. Первые промышленные роботы с развитой сенсорной системой и микропроцессорным управлением получили практическое применение в 1980-1981 гг. К их числу относятся снабженные системами технического зрения роботы «Пума», «Юнимейт», «Ауто-плейс», «Цинциннати милакрон», сборочные робототехнические системы фирм «Хитачи», «Вестингауз» (система «Апас»), «Дженерал моторс» (система «Консайт»). Третье поколение роботов – это интеллектуальные роботы. Интеллектуальный робот – это робот конкретного назначения, в основных функциональных системах которого используются методы искусственного интеллекта. Возникновение интеллекта у роботов связано с развитием ЭВМ. В 1967 г. в США (Стэндфордский университет) был создан лабораторный макет робота, снабженного техническим зрением и предназначенного для исследования и отработки системы «глаз – рука», способной распознавать объекты внешней среды и оперировать ими в соответствии с заданием. В 1971 г. в Японии также были разработаны экспериментальные образцы роботов с техническим зрением и элементами искусственного интеллекта: робот «Хивип», способный самостоятельно осуществлять механическую сборку простых объектов по предъявленному чертежу, и робот ЭТЛ-1. |
Рис. 21 Робот «Хивип»
|
В 1972-1975 годах в Киевском Институте кибернетики под руководством Н. М. Амосова и В. М. Глушкова был создан макет транспортного автономного интегрального робота (ТАИР). Робот демонстрировал целенаправленное движение в естественной среде, обход препятствий и т.п. Конструктивно ТАИР представлял собой трехколесную самоходную тележку, снабженную системой датчиков: оптическим дальномером, навигационной системой с двумя радиомаяками и компасом, контактными датчиками, датчиками углов наклона тележки, таймером и др. Особенностью, которая отличает ТАИР от многих других систем, созданных в СССР и за рубежом, является отсутствие в его составе компьютера в том виде, к которому мы привыкли. Основу системы управления составляет аппаратно реализованная нейронная сеть (узлы сети – специальные электронные схемы, собранные на транзисторах, связи между узлами – резисторы), на которой реализуются различные алгоритмы обработки сенсорной информации, планирования поведения и управления движением робота. Одновременно развернулись работы в новой специфической области робототехники — шагающие машины как принципиально новое транспортное средство повышенной проходимости, образцом для которого являются ноги животных и человека. Были созданы экспериментальные образцы четырех- и шестиногих транспортных машин, протезов ног человека, так называемых экзоскелетонов, для парализованных и тяжелобольных. Конец XX – начало XXI вв Следующий этап развития робототехники характеризуется дальнейшей интеллектуализацией, а также миниатюризацией роботов. К 1980 г. были созданы первые мобильные роботы, сначала подвесные, затем напольные. Последние двигались по светоотражающей полосе или по электромагнитному полю кабеля, проложенного на полу. Второе поколение мобильных роботов – это роботы, управляемые человеком-оператором – сначала по кабелю, затем по радио. Это были первые роботы для экстремальных ситуаций – роботы-разведчики и технологические роботы. В конце XX века возродился интерес к роботам-андроидам. В отличие от их первых реализаций последние достижения робототехники сделали возможным создание подобных устройств для обеспечения вполне реальных потребностей. Родина андроидной робототехники – это Япония. Именно там она зародилась и сейчас японские роботы находятся на пике прогрессивности. В университете Васеда (Waseda University) в Токио в 1984 году завершается создание андроидного робота Wabot-2. Этот робот может читать ноты с помощью системы технического зрения и играет прочитанную мелодию на органе с помощью десяти пальцев. |
 |
 |
| Рис. 22 Робот-разведчик | Рис. 23 Андроидный робот Wabot-2 |
|
К 2000 г. в мире произошёл переход к созданию третьего поколения мобильных роботов. Это интеллектуальные роботы с автономной системой навигации и передвижения в заранее определённой среде и с интерактивным управлением от оператора через интеллектуальный интерфейс. Одновременно начали разворачиваться поисковые разработки по миниатюризации этих роботов – созданию мобильных мини- и микророботов, основанных на принципиально новых движителях. Современное развитие робототехники В настоящее время робототехника развивается по следующим направлениям: vпромышленная робототехника; vмобильная робототехника; vмикро- и наноробототехника. Каждое из этих направлений отличается соответствующими новыми технологиями. В настоящее время в мире имеется свыше миллиона различного вида роботов. Применяемые роботы имеют как простую, так и очень сложную конструкцию и отличаются по относительным размерам в миллионы раз. |
|
|
|
|
Рис. 24 Роботизированная рука |
Рис. 25 Робот-экзоскелет HAL-5 |

| Современные промышленные роботы, снабженные нейрокомпьютерами, могут опознавать изображения, понимать речь человека, принимать оптимальные решения и самообучаться. В промышленности роботы используются для очень ограниченного числа операций, выполняемых по многу часов в день, без свойственных человеку усталости, раздражения и ошибок. К этой категории относятся манипуляторы, основание которых обычно монтируют неподвижно. Они особенно удобны для выполнения утомительных или монотонных операций в промышленности. Манипуляторы также используются в средах, вредных или опасных для жизни. |
|
|
|
|
Рис. 26 Сварочный робот |
Рис. 27 Покрасочный робот |

| Мобильные роботы, созданные на базе самых последних достижений науки и техники, применяются практически во всех сферах человеческой деятельности. Они используются в медицине для помощи престарелым людям и инвалидам и сотрудничают с хирургами; работают с опасными химическими и радиоактивными веществами; обеспечивают безаварийную работу нефте- и газопроводов, ведя контроль состояния внутренней поверхности труб. |
|
|
|
|
Рис. 28 Робот-хирург |
Рис. 29 Робот-патрульный |
|
Получают распространение сервисные роботы, предназначенные для работы в частных домах для охраны и уборки помещений; для работы в офисах в качестве швейцаров, секретарей; для работы на выставках и других общественных местах. |
|


|
|
|
|
Рис. 30 Робот-пылесос |
Рис. 31 Робот для чистки бассейна |



Рис. 32 Робот-спасатель Дракон для разбора завалов
| Мобильные роботы применяются в таких областях деятельности, где участие человека ограничено, например, в условиях космоса и при глубоководных работах; в военных операциях; для работы в условиях техногенных и природных катастроф. |
 |
 |
| Рис. 33 Робот-шахтер RASSOR для сборки лунного грунта | Рис. 34 Робот Mantis |
Широкое распространение в последнее время получили шагающие роботы, это роботы, имитирующие животных и перемещающиеся при помощи ног. Рассмотрим несколько самых интересных экземпляров на сегодняшний день. Американские инженеры из компании Micromagic Systems создали гигантского шестиногого робота-вездеход. Вездеход разработчики назвали Mantis (от английского «богомол»). Mantis - самый большой робот в мире. Он оснащен дизельным двигателем. Его вес около двух тонн. Богомол способен передвигаться по любой местности. Каждая из шести конечностей модели может работать автономно, что позволяет роботу маневрировать, аккуратно обходя сложные препятствия, и при необходимости освобождать себе путь, разбирая завалы. Кабина робота оборудована панелью управления, которая обеспечивает оператора визуальной информацией о функционировании робота, например, о положении каждой его конечности.

Рис. 35 Роботы-мулы LS3
Компания Boston Dynamics явила миру двух роботов-мулов LS3, назначение которых - перевозка грузов для морской пехоты США. Этот робот проходит на одной заправке 32 км, причем способен перевозить груз весом в 180 кг. Имеется встроенная система GPS-навигации, позволяющая ему самостоятельно выбирать маршрут, а также система распознавания жестов и голоса людей.
К мобильным роботам относятся и человекоподобные роботы. Приведем несколько примеров.
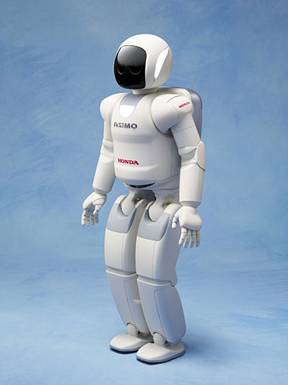
ASIMO – это робот-гуманоид, созданный компанией Хонда. Ростом в 130 сантиметров и весом в 54 килограмма, робот похож на маленького астронавта, который несет рюкзак. Он умеет ходить на двух ногах, копируя человеческую походку скоростью в 6 км/ч. ASIMO был создан в Японии в «Центре исследований и развития» Хонды. Он умеет «танцевать», «бегать», «слушать» и даже «говорить». Этот робот способен распознавать движущиеся объекты и определять расстояние до них, понимает жесты, обходит препятствия и может без падений спуститься с лестницы. Робот ASIMO, представленный в 2010-ом году, способен откликаться на собственное имя, оборачиваться на источник шума и обучен работать в Интернете. У него берут интервью и снимают про него фильмы.
 |
 |
| Рис. 36мРобот-андроид ASIMO | Рис. 37 Робот-андроид QRIO |
Робот - андроид QRIO разработанный компанией Sony. Рост робота составляет 58 сантиметров, вес — 8 килограмм. 38 встроенных сервомотора наделяют QRIO достаточной свободой движений и хорошей координацией. Например, робот может быстро передвигаться, брать предметы, подниматься по лестнице, танцевать и держать равновесие, стоя на одной ноге.
Робот знает 60000 слов на разных языках мира, умеет распознавать лица, слушаться команд и, как утверждают разработчики, задавать «умные» вопросы в зависимости от ситуации.
Корейские учёные разработали первого собственного андроида женского пола, способного менять выражение лица - EveR-1 (Ева). Ее рост – 1,6 м, вес – около 50 кг, она понимает человеческую речь, умеет выражать эмоции. «Девушка» понимает 400 слов, умеет держать зрительный контакт во время разговора. Движения ее губ соответствуют произносимым словам. Ева умеет даже общаться по мобильному телефону. Пятнадцать крошечных моторчиков, встроенных в силиконовое лицо робота, позволяют выражать различные эмоции. Их пока всего четыре: радость, злость, печаль, счастье.
 |
 |
| Рис. 38 Андроид EveR-1 | Рис. 39 Бионический робот андроид Рекс |
В начале 2013 года в лондонском Музее науки представили первого«бионического человека». Биоробот Рекс может говорить, видеть и слышать. В его теле также есть внутренние органы — поджелудочная железа, почки, селезенка, трахея, по сосудам течет «синтетическая» кровь, перегоняемая искусственным сердцем. Робот наделен искусственным интеллектом и синтезатором голоса, он понимает фразы и способен отвечать на вопросы.
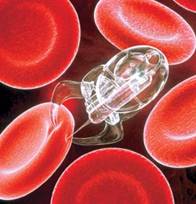

Рис.40 Нанороботы в медицине
Наноробототехника как новое самостоятельное направление в науке и технике сформировалось за последние два десятилетия. Сущность нанотехнологий заключается в способности работать на молекулярном уровне с отдельными атомами и частицами и создавать структуры или приборы с принципиально новой молекулярной организацией, имеющих размеры 1 – 100 нм. Важной проблемой нанотехнологий является проблема манипулирования нанообъектами. Создание нанороботов позволит автоматизировать молекулярное производство, предоставив человеку управление нано процессами в привычном для него размерном мире.

Поделиться с друзьями: